

Application of the CR3BP: Lagrange Points#
The equations of motion of the circular restricted three body problem (CR3BP) were shown in Eq. (71). These non-dimensional equations of motion do not have a general analytical solution.
However, there are a set of five points for which the tertiary mass is in equilibrium with respect to the primary and secondary masses. An object placed at one of the equilibrium points will, if it is not perturbed, remain at that location indefinitely. These locations are called Lagrange Points.
According to the conditions for equilibrium, the acceleration and velocity components at the Lagrange points are zero:
and likewise for the dimensional coordinates as well. Plugging these conditions in to the equations of motion, we find:
In the last equation, for \(z^*\), the terms in the parentheses are both greater than zero. Therefore, there is no way for them to cancel each other out, and the only way for the equation to be satisfied is if \(z^* = 0\). Thus, the Lagrange points lie in the orbital plane.
Now, we need to solve for the \(x^*\) and \(y^*\) coordinates of the Lagrange points. There are two conditions that we need to consider, since they end up with different solutions:
\(y^* \neq 0\), giving the so-called equilateral Lagrange points
\(y^* = 0\), giving the so-called collinear Lagrange points
The collinear Lagrange points lie along the \(x^*\) axis, between \(m_1\) and \(m_2\). The equilateral Lagrange points form an equilateral triangle with \(m_1\) and \(m_2\) as two of the corners and sides of length \(r_{12}\).
Equilateral Lagrange Points#
To find the equilateral Lagrange points, we assume \(y^*\neq 0\). Now we have 2 equations and 2 unknowns. Since \(y^*\neq 0\), the \(y^*\) in the second equation of motion (Eq. (73)) will cancel from both sides, and we end up with:
The equation for \(x^*\) in Eq. (73) we see the \(\left(1 - \pi_2\right)/\sigma^3\) term, so let’s solve the \(y^*\) equation for that and plug into the \(x^*\) equation:
Simplifying, we find:
Then we can use the definition of \(\psi\) to find \(r_2\) in dimensional coordinates:
Plugging the result of Eq. (76) back into Eq. (74) equation, we find:
Then we can use the definition of \(\sigma\) to find \(r_1\) in dimensional coordinates:
Since if \(a = b\) and \(b = c\), then \(a = c\), we find:
for the equilateral Lagrange points. Eq. (80) shows that the distance from \(m_1\) to \(m\) is the same as the distance from \(m_2\) to \(m\) and from \(m_1\) to \(m_2\). This defines an equilateral triangle, giving these Lagrange points their name.
From the definition of \(\vector{\sigma}\) and \(\vector{\psi}\), we can take their magnitudes and equate them to solve for the values of \(x^*\) and \(y^{*}\) at the equilibrium points:
where we have also used the fact that \(z^* = 0\) for the Lagrange points. Using the result from Eq. (80) that \(\sigma = \psi\) for the equilateral points, we find:
The equilateral Lagrange points are given the symbols \(L_4\) and \(L_5\), for the positive and negative \(y^*\) values, respectively:
To convert these to dimensional \(x\) and \(y\) coordinates, you should multiply by \(r_{12}\).
Collinear Lagrange Points#
For the collinear Lagrange points, we set \(y = z = y^{*} = z^* = 0\) in the equations of motion, Eq. (71). We make this choice by inspection, seeing that setting \(y = y^{*} = 0\) is one possible solution (the other case, \(y^*\neq 0\) we just handled).
This leaves only the \(x^*\) equation of motion, since the other two are trivially \(0=0\). For \(x^*\), we have from Eq. (73):
The terms \(\sigma^3\) and \(\psi^3\) in the bottom of both terms are found by cubing the magnitude of the vectors \(\vector{\sigma}\) and \(\vector{\psi}\). To find the vector magnitude, we necessarily have to take the square root, so we do not know the sign of the magnitude. Cubing a negative number will result in another negative and cubing a positive number will result in another positive.
Therefore, we do not know what the sign of \(\sigma^3\) or \(\psi^3\) will be, we have to include that as part of the solution of this equation. Cubing the magnitudes of \(\vector{\sigma}\) and \(\vector{psi}\) from Eq. (66) with \(y^* = 0\) for the collinear points, we find:
where the single vertical lines indicate that we’re taking the absolute value. Substituting these into Eq. (84), we find:
We cannot cancel any of the terms because we don’t know the sign of the cubic term on the bottom.
This equation is cubic in \(x^*\), so it will have three separate values of \(x^*\) that solve the equation, as long as \(0 < \pi_2 < 1\). In the cases where \(\pi_2 = 0\) or \(\pi_2 = 1\), either \(m_2\) or \(m_1\) must be zero, which aren’t very interesting.
There is no analytical solution to this equation, it must be solved numerically. There are many methods to solve the equation numerically, my suggestions are to use scipy.optimize.newton() in Python and fzero in Matlab. We will see how to use these functions in the next example.
In the meantime, Fig. 15 shows the solution of Eq. (86):
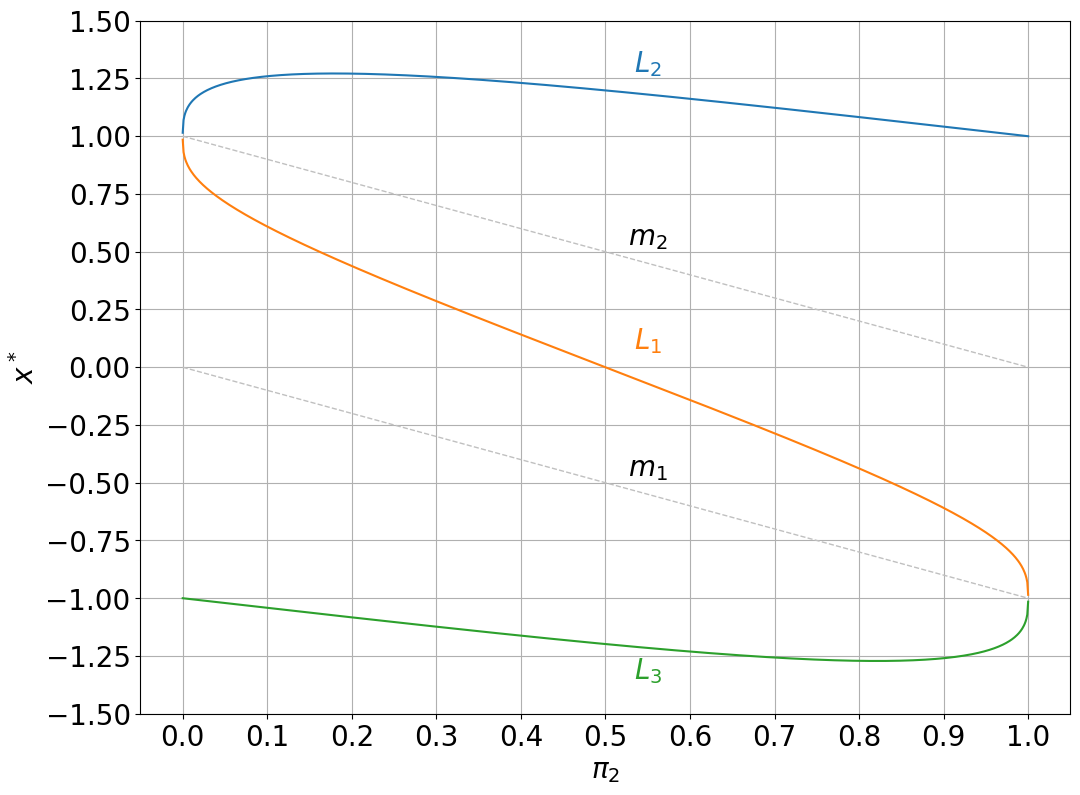
Fig. 15 The solutions of Eq. (86), showing the dimensionless positions of the collinear Lagrange points as a function of the dimensionless mass.#
On this figure, the \(x\) axis is \(\pi_2\) and the \(y\) axis is \(x^*\). For a given value of \(\pi_2\), we can locate the three values of \(x^*\) that solve the equation. The gray dashed lines give the corresponding positions of \(m_1\) and \(m_2\) at the given value of \(\pi_2\).
The solutions for \(x^*\) for the collinear Lagrange points lie on the S-curve shape. For a given value of \(\pi_2\), we can see there are 3 solutions of the function, corresponding to the three collinear Lagrange points for that system.
By convention, the Lagrange points are numbered such that \(L_1\) lies between \(m_1\) and \(m_2\), \(L_2\) lies to the right of \(m_2\), and \(L_3\) lies to the left of \(m_1\). Thus, we can see on the figure that the upper part of the S-curve is the solution for \(L_2\). Below \(x^{*} = 1.0\), the solution is for \(L_1\), since that lies between \(m_1\) and \(m_2\). Finally, below \(x^{*} = -1.0\), the solution is for \(L_3\).
Fig. 16 plots the five Lagrange points in non-dimensional coordinates as a function of the mass ratio \(\pi_2\).